(with the y dimension suppressed)
In everyday life, we’re familiar with the idea of a three-dimensional object moving through space without changing its shape. In Newtonian physics, space obeys Euclidean geometry, and the set of points that an object occupies at any given time is an unambiguous concept. A map from R3 to R3 that preserves distances and angles is called a Euclidean isometry. If we have a continuous 1-parameter family of such maps, E(t), that take the initial location xi(0) of each point in the object to its present location xi(t):
xi(t) = E(t) xi(0)
then we say that the object is undergoing rigid motion.
In the spacetime of special relativity, this issue becomes more subtle, since there is no universal way to slice up spacetime into space and time. If you and I are in relative motion, our different ideas of “space” at some moment – the 3-dimensional slice through spacetime that lies orthogonal to our world lines – can lead us to ascribe different shapes to the same object, because those slices will cut through the world-tube of the object (the totality of the world lines of its constituent particles) in different ways. And we can’t necessarily just defer to the idea of an observer travelling with the object itself, because if the object is rotating or accelerating, observers attached to different points on the object might suffer the same kind of disagreement.
In 1909, the German physicist Max Born suggested the following definition for rigid relativistic motion. We examine the world lines of any pair of points belonging to the object, and in the limit of the two points being infinitesimally close, we say the object is undergoing Born rigid motion if the orthogonal distance between all such pairs of world lines is constant over time. This means that any two observers fixed to neighbouring points on the object would measure their mutual separation as unchanging, and they could hold the two ends of a spring without it being stretched or squeezed as they moved.
Note, however, that we are not saying that no forces would need to be applied to the object in order to maintain this state of rigid motion, or that the required distribution of forces across the object would happen automatically by virtue of its material properties. The idealisation, often used in Newtonian physics, of a “perfectly rigid body” that responds to a push at one end with the far end moving instantly in exactly the manner needed to maintain the object’s shape becomes even more absurd in special relativity, which imposes a limit of the speed of light on the rate at which any such influence can propagate.
But our discussion here will be focused on the geometry of rigid motion in special relativity, rather than the detailed material properties or other factors that would be needed to implement it in practice. To that end, it will be better to imagine Born rigid motion as a state achieved by something like a flotilla of spaceships, each with its own engine, rather than something like a solid slab of steel whose particles all push and pull on each other. The spaceships in the flotilla will all measure unchanging distances from their immediate neighbours, and if they wished the crews could erect a scaffold of ladders and bridges from ship to ship without fear of it being torn apart – but that rigidity will be a consequence of the ships all firing their engines in precisely the manner required, rather than the scaffold imposing rigidity through its own material strength.
So, we will look for geometrical solutions to the constraints of Born rigid motion, and explore them under the assumption that any accelerations required can simply be imposed by fiat.
|
| World lines of Rindler flotilla (with the y dimension suppressed) |
The simplest solution to the constraints of Born rigidity would be to take a flotilla of spaceships that are all at rest in some chosen reference frame, and just let them remain at rest. Other observers might consider them all to be in motion, with identical velocities, but in any case their world lines through spacetime will all be straight lines, parallel to each other, and the orthogonal distance between any pair of these world lines will never change.
Beyond that trivial solution, the most famous example of Born rigid motion is what we will refer to as the Rindler flotilla. Again, we consider a flotilla of spaceships that are instantaneously at rest in some frame, but in this case we give them all world lines that we obtain by performing a continuous hyperbolic rotation (also known as a boost) in some plane that is spanned by one spacelike and one timelike direction. As we rotate by increasing amounts, every ship will trace out a hyperbola in that chosen plane (or a plane parallel to it). To be clear, these are hyperbolas in spacetime, and we are talking about the world lines of the ships, not their paths through space. Having this kind of hyperbola as your world line means travelling along a straight line in space, with a contant acceleration.
To make this concrete, suppose our ships were all initially at rest in a frame whose Cartesian coordinates we will call (t, x, y, z); we will identify ship number i by the event xi(0) = (0, xi, yi, zi) on its world line at t = 0. If we perform a boost with a hyperbolic angle of q in the t-z plane, that initial event is mapped to:
xi(q) = (zi sinh(q), xi, yi, zi cosh(q))
In flat spacetime, we measure the distance or time between two events, (t1, x1, y1, z1) and (t2, x2, y2, z2), as:
s((t1, x1, y1, z1), (t2, x2, y2, z2))2 = –(t1–t2)2 + (x1–x2)2 + (y1–y2)2 + (z1–z2)2
where a spacelike distance has a positive value for s2 and a timelike interval has a negative value (then we take the square root of the absolute value of this to get the time). [We will follow the common practice in relativistic physics of using geometric units where the speed of light, c, is equal to 1. That is, if we measure distance in metres, we measure time in units of “metres” too, by which we mean the time it takes light to travel one metre.]
More generally, we compute the dot product between two spacetime vectors v = (vt, vx, vy, vz) and w = (wt, wx, wy, wz), as:
g(v, w) = –vt wt + vx wx + vy wy + vz wz
This formula is known as the Minkowski metric. The dot product of a vector with itself is its squared length, and when the dot product between two vectors is zero, they are orthogonal in the spacetime sense. If you’re unfamiliar with this way of measuring things, this article on special relativity sketches the basics.
Using the Minkowski metric, it’s easy to confirm that:
s(xi(q), (0, xi, yi, 0))2 = zi2 (cosh(q)2 – sinh(q)2)
= zi2
So, each ship in the flotilla has a world line that traces out a hyperbola in spacetime that is “centred” on the event (0, xi, yi, 0) and lies at a constant distance from it of zi.
We want to check that the orthogonal distance between any pair of world lines for these ships remains constant along the lengths of the curves. First, we note that if we simply pick the events on each world line with the same q value, the spacetime distance between the two events will be unchanged from whatever it was initially, at q = 0. That is, for all q:
s(xi(q), xj(q))2 = (xi – xj)2 + (yi – yj)2 + (zi – zj)2 (cosh(q)2 – sinh(q)2)
= (xi – xj)2 + (yi – yj)2 + (zi – zj)2
We’re not quite done yet, though. We also need to prove that the displacement vector that points between these two events is orthogonal to each world line at the event in question. We can compute a tangent to our world lines by differentiating with respect to the hyperbolic angle q:
xi'(q) = (zi cosh(q), 0, 0, zi sinh(q))
We then have:
g(xi'(q), xi(q)–xj(q)) = –zi cosh(q) (zi – zj) sinh(q) + zi sinh(q) (zi – zj) cosh(q) = 0
So the constant distance we established really is a constant orthogonal distance between the world lines. That means the crew on each spaceship will consider these distances to be measured perpendicular to their own notion of what constitutes the time direction through spacetime, and hence in a direction that both crews consider to be purely spatial.
Now, we need to add some caveats here. First, we note that any point with zi = 0 will remain fixed by the family of hyperbolic rotations we have chosen, so we need to rule that out as a possible location for any ship in the flotilla; a world line must be a line, not a single event. However, we can’t just omit z = 0 but then allow our flotilla to have both positive and negative z values for different ships.
Why not? To see this, we need to calculate the proper acceleration of each ship, which is a simple geometric property of the shape of its world line. In special relativity, acceleration is a 4-dimensional spacetime vector that corresponds to the rate of change, with proper time, of an object’s 4-velocity, which is the unit-length tangent to its world line.
We already have a tangent to each world line:
xi'(q) = (zi cosh(q), 0, 0, zi sinh(q))
This is not of unit length, though:
g(xi'(q), xi'(q)) = –zi2 (cosh(q)2 – sinh(q)2)
= –zi2
So a unit-length tangent is given by:
ui(q) = xi'(q) / zi
= (cosh(q), 0, 0, sinh(q))
Now, proper time, τi, measured along each world line will not be measured by the hyperbolic angle, q, but the computation we have just done tells us how the two quantities differ:
dτi/dq = zi
dq/dτi = 1/zi
We can now find the acceleration of the ship:
ai(q) = dui(q)/dτi
= ui'(q) dq/dτi
= (1/zi) (sinh(q), 0, 0, cosh(q))
This acceleration 4-vector is spacelike, and its magnitude is independent of q:
ai = √g(ai(q), ai(q)) = 1/|zi|
A ship with a positive zi will be accelerating in the direction of increasing z. There is nothing to prevent the existence of ships with a negative zi, accelerating in the opposite direction; the fact that their proper time τi runs in the opposite direction to the hyperbolic angle q is not a problem, since q is just a mathematical parameter. But the idea of erecting scaffolding between ships in the flotilla shifts from fanciful to wildly unphysical if we imagine a ladder joining two ships with negative and positive values of zi, because the acceleration needed, 1/z, is unbounded as we move along such a ladder. So we need to pick a sign for zi, positive or negative, and stick to it for the entire flotilla. In what follows, for the sake of simplicitly, we will assume we chose a coordinate system where all the zi are positive.
Having made that choice, we can go ahead and imagine what it would be like moving around on the scaffolding: a lattice linking all the ships, which remains rigid despite their different accelerations. Moving in a plane with a constant z value would be more or less like moving on a scaffold on the surface of a planet whose gravity matched the associated acceleration, 1/z, but climbing the ladder in the direction that felt like “up” would decrease the acceleration, and climbing “down” would increase it. Just how rapidly the acceleration changed would vary with z:
da/dz = d(1/z)/dz = –1/z2
Climbing up and down the ladders would also reveal that there is no way to keep clocks synchronised across the whole flotilla. No clock ever really “runs fast” or “runs slow” for relativistic reasons: every clock measuring proper time ticks at one second per second. But clocks whose world lines start together, move apart, and then meet up again can still record different amounts of proper time, just as odometers will record different distances for two different routes between the same two points.
If you and a friend sychronise watches, climb the ladders to different levels z1 and z2, spend some time there and then meet up again, the elapsed time on the two watches will be different, with the ratio between the times obeying the relationship (if we neglect the time spent in transit between levels):
τ1 / τ2 = z1 / z2
That is, the “higher” you ascend, into a region of lower acceleration, the more time will have passed for you compared to your friend. This is similar to the way time behaves in a gravitational field, though here there is no curved spacetime, only curved world lines in flat spacetime.
This related page describes some more elaborate thought experiments that can be conducted in a Rindler flotilla, such as trying to lower an object on a string past the Rindler horizon formed by light rays asymptotic to the hyperbolas in the flotilla.
Having described one simple case of Born rigid motion, we will now seek to generalise it.
In special relativity, the analog of the group of Euclidean isometries is known as the Poincaré group; it consists of all maps of flat spacetime that preserve the angles and distances measured by the Minkowski metric. The 1-parameter family of hyperbolic rotations we discussed in the previous section belong to the Poincaré group. So ... maybe we can just replace them with any other continuous, 1-parameter family of transformations, P(q), in the Poincaré group, which we apply to an initial set of events to generate the world lines for the ships in the flotilla?
There are two problems with this. The first is that, in general, we might not end up with curves through spacetime that always have timelike tangents, which is a requirement for a valid world line. But that’s easy enough to fix: we can just identify those choices where the curves are timelike.
The second problem is the issue of ensuring that the distances we preserve are the orthogonal distances between the world lines. If we take any old 1-parameter family of Poincaré group elements P(q) and apply it to a set of events {xi(0)}, then by definition we will, at each particular value of q, get a new set of events, {xi(q)}, with the same spacetime distances between them as the initial set. But we have no guarantee that the world lines themselves will be orthogonal to the vectors that separate those events.
What we had in our previous example was the fact that the vector xi(q) – xj(q) was always orthogonal to the tangents to both world lines, xi'(q) and xj'(q). That won’t be true for an arbitrary choice of P(q).
To see exactly when it will be true, it will be helpful to shift our focus from the world lines to their tangents. Suppose we have a way of assigning a putative tangent vector to every event in spacetime. We can do that quite easily for the Rindler flotilla we described in the previous section. The vector field of tangents T there was given by:
T(t, x, y, z) = (z, 0, 0, t)
This follows from the formulas for xi(q) and xi'(q); a comparison of the two shows that we get the latter simply by swapping the t and z coordinates in the former and setting the other two coordinates to zero.
It’s easy to check that T satisfies the property:
g(T(p) – T(q), p – q) = 0
That is, the difference in the tangents, T(p) and T(q), at two events, p and q, is always orthogonal to the vector from p to q. Because the Minkowski metric is linear in each argument, it then follows that if the tangent at p is orthogonal to p – q, then the tangent at q is also orthogonal to p – q.
We can always obtain a rule like this, for assigning tangent vectors to events in spacetime, from a choice of an element of the Poincaré algebra. The Poincaré algebra is, roughly speaking, what we get if we take any smooth path through the Poincaré group that passes through the identity element, and find its derivative there. But to make this more concrete, we need to talk about the matrices we use to describe the Poincaré group.
Just as we can describe any rotation in Euclidean space with a suitable 3×3 matrix, R, we can describe any Lorentz transformation of spacetime with a suitable 4×4 matrix, L. The respective requirements are that, for all vectors v and w in the appropriate space:
(R v) · (R w) = v · w
g(L v, L w) = g(v, w)
But the full Euclidean and Poincaré groups go beyond rotations and Lorentz transformations, and allow for translations as well: adding a constant vector to everything. Of course, we could just write this by explicitly adding some vector b:
P v = L v + b
But it turns out to be convenient to be able to package everything into a single matrix. Suppose we put together a 5×5 matrix, like this:
| P | = |
|
where L is a 4×4 matrix describing a Lorentz transformation, b is any 4-dimensional vector, inserted here as part of the 5th column of the matrix, and the 0 at the bottom is construed as a row of four zeroes. Then if we add an extra coordinate to all our vectors and set it to 1, so v becomes (v,1), we can write:
P (v, 1) = (L v + b, 1)
where the LHS is now a bona fide matrix multiplication using the 5×5 matrix P.
Given any differentiable 1-parameter family of Poincaré group elements, P(q), that passes through the identity, the components L and b also become functions of q, and we can take the derivative with respect to q, then set q to 0 (assuming P(0) is the identity).
| P'(0) | = |
|
We already have the condition that L must preserve the Minkowski metric:
g(L(q) v, L(q) v) = g(v, v)
If we take the derivative of this with respect to q, then set q to 0, we get:
2 g(L'(q) v, L(q) v) = 0
g(L'(0) v, v) = 0
And if we then choose our tangent vectors via the rule:
(T(p), 1) = P'(0) (p, 1)
then T will satisfy the condition we require:
g(T(p) – T(q), p – q) = 0
To make this concrete, for the Rindler flotilla in the previous section we could use:
| P(q) | = |
|
||||||||||||||||||||||||||
| P'(0) | = |
|
In general, an element of the Poincaré algebra (that is, a possible vaue for P'(0) for any path through the identity of the Poincaré group) will take the form:
| A | = |
|
To generalise the construction, we now need to be able to work backwards: given A, we need to be able to find the world lines whose tangents are given by:
(T(p), 1) = A (p, 1)
To construct the world lines, we need to solve a matrix differential equation:
P'(q) = A P(q)
P(0) = I
It turns out that this has exactly the same form for its solution as the same kind of differential equation for real numbers:
P(q) = exp(q A)
The exponential of a matrix can be defined by a power series, just like the ordinary exponential function:
exp(q A) = I + (q A) + (1/2!) (q A)2 + (1/3!) (q A)3 + ...
The result will always be an element of the Poincaré group. We won’t try to compute the exponential for the most general form that A can take; for the cases we are interested in, we will always have something a bit simpler.
For example, suppose we choose A to be almost the same as the Poincaré algebra element that works for the Rindler flotilla, but we add in a translation vector, b:
| A | = |
|
If we exponentiate A q, we get:
| P(q) | = |
|
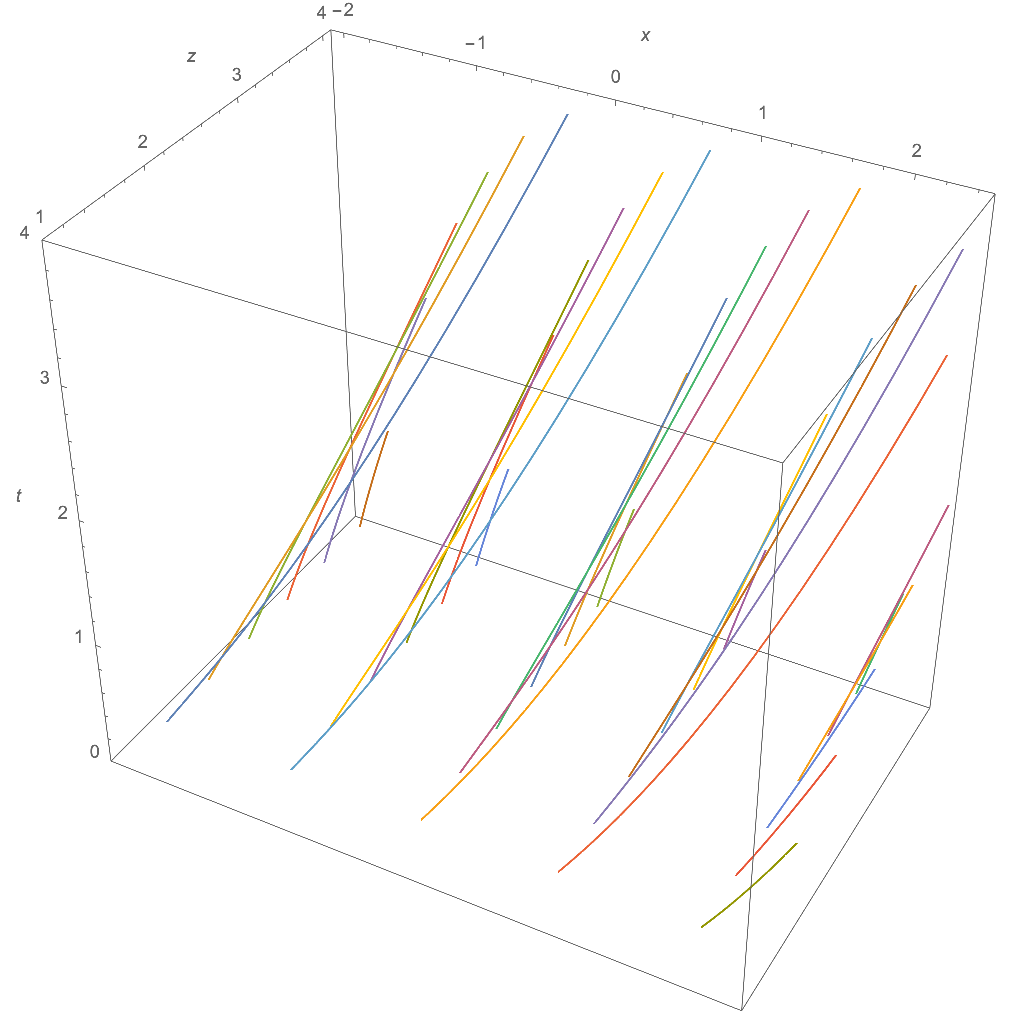 |
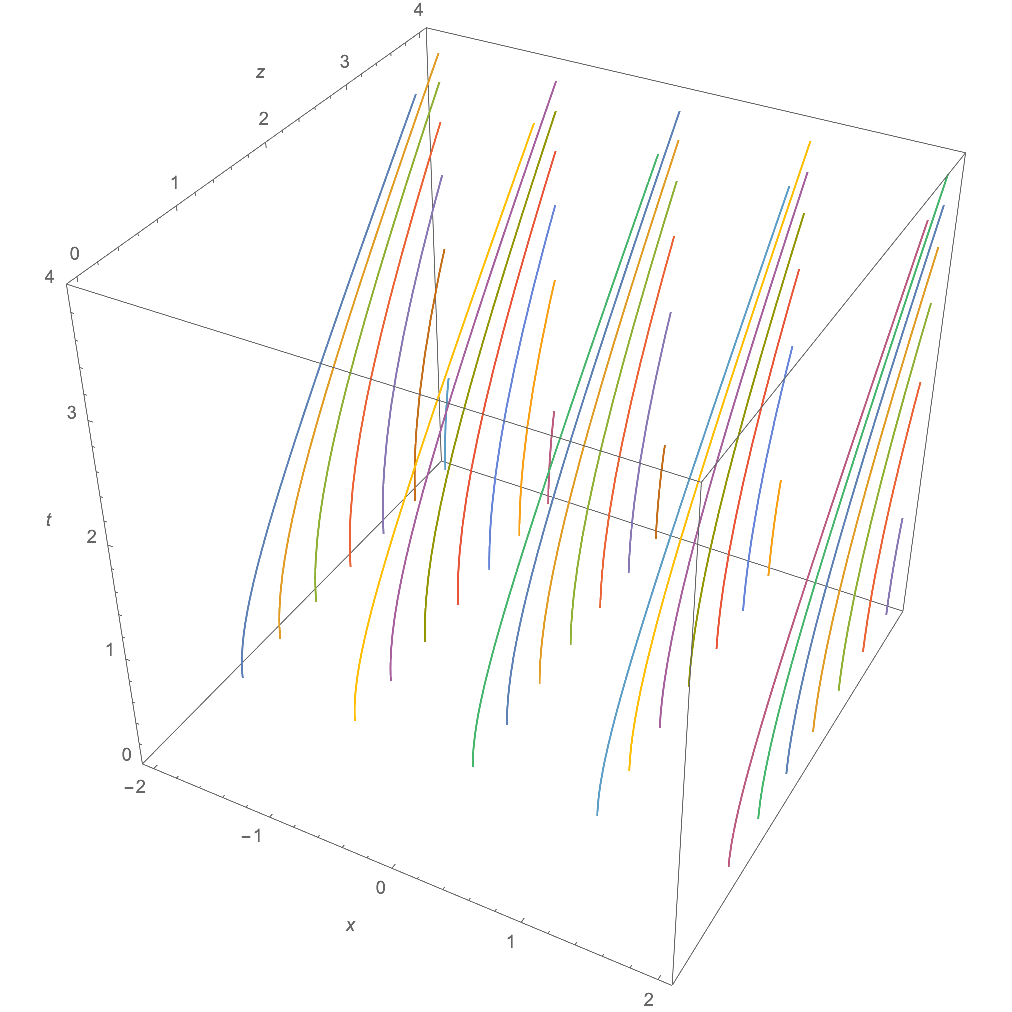
| World lines of Rindler flotilla with translation (with the y dimension suppressed) |
Applied to our original set of events, xi(0) = (0, xi, yi, zi), this yields the world lines:
xi(q) = ((zi + bt) sinh(q) + bz (cosh(q) – 1), xi + bx q, yi + by q, (zi + bt) cosh(q) + bz sinh(q) – bt)
For the case bx = by = 0, we could make this solution identical to the original Rindler flotilla just by shifting the origin for the t and z coordinates then setting bz = bt = 0, but if that is not the case, we have a genuinely different physical situation. However, we could rotate the coordinate system to make by = 0, so we can obtain all physically distinct solutions by assuming that only bx is non-zero. In that case, the world lines become:
xi(q) = (zi sinh(q), xi + bx q, yi, zi cosh(q))
with tangent vectors:
xi'(q) = (zi cosh(q), bx, 0, zi sinh(q))
When are these tangents guaranteed to be timelike? We have:
g(xi'(q), xi'(q)) = bx2 – zi2
So, all the world lines will be timelike along their entire length, so long as we impose the restriction:
|zi| > |bx|
The acceleration is:
a(q) = (zi sinh(q), 0, 0, zi cosh(q)) / [zi2 – bx2]
and its magnitude is:
ai = √g(ai(q), ai(q)) = |zi| / (zi2 – bx2)
So, as before, every ship has a constant proper acceleration along the z axis, which decreases with increasing |zi|.
Apart from a slight difference in the acceleration profile, there is another consequence of a non-zero bx. In the original Rindler flotilla, it was possible to find a family of hyperplanes that cut across all of the world lines orthogonally, and hence constituted a common notion of “space” for all the ships. These hyperplanes are spanned by the x and y directions, and a third vector, (sinh(q), 0, 0, cosh(q)). Although different ships would experience different time intervals between the moments they crossed successive hyperplanes, the hyperplanes themselves are an objective feature of the geometry of the flotilla.
But with non-zero bx, we can no longer construct a family of 3-dimensional hypersurfaces that are orthogonal to all the world lines. To see this, consider the world lines of ships i and j, and the dot product between the tangent to either one of them and the vector joining the events at two different values for the q parameter:
Dij = g(xj'(qj), xj(qj) – xi(qi))
= bx (bx (qj – qi) + xj – xi) – zj zi sinh(qj – qi)
= bx2 Δqij + bx Δxij – zi zj sinh(Δqij)
For bx = 0, we just recover the result from the last section that we can make the q parameter the same on both world lines to obtain two events whose separation vector is orthogonal to the world lines. For non-zero bx, we can’t solve Dij = 0 explicitly for the difference in the q parameters, but we can find Δq numerically. For example, suppose we set bx = 1, and move in a “square” between world lines whose initial (x, z) values are (1,2), (2,2), (2,3) and (1,3). The corresponding changes in q required for the vectors to be orthogonal are:
| (xi, zi) → (xj, zj) | Δqij |
| (1,2) → (2,2) | 0.32562 |
| (2,2) → (2,3) | 0 |
| (2,3) → (1,3) | –0.124637 |
| (1,3) → (1,2) | 0 |
So, after making a complete circuit between these four ships, moving orthogonally to the world lines at each step, we end up with a net change in the q parameter: we are not back at the same event where we started.
Although there are no hypersurfaces in spacetime that are orthogonal to all the ships’ world lines, we can still ask the question: if we construct a scaffold that connects all the ships, what will its (three-dimensional) geometry be? It might sound strange to ask this, when we can’t point to any three-dimensional hypersurface whose geometry we are asking about. But we can still ask about the orthogonal distances between neighbouring world lines, and those distances give us a perfectly well-defined geometry that the items of scaffolding linking the ships must obey.
To make this concrete, we adopt a coordinate system where world lines are labelled by the coordinates of each ship at t = 0. We will call these spatial coordinates (X, Y, Z), using capitals to distinguish them from the Cartesian spacetime coordinates (t, x, y, z). We can compute a metric for (X, Y, Z) by taking a generic world line in the flotilla:
x(q) = (Z sinh(q), X + bx q, Y, Z cosh(q))
computing its derivatives with respect to each of our new spatial coordinates:
∂Xx(q) = (0, 1, 0, 0)
∂Yx(q) = (0, 0, 1, 0)
∂Zx(q) = (sinh(q), 0, 0, cosh(q))
and projecting them into the three-dimensional subspace orthogonal to the world line. That amounts to subtracting the orthogonal projection onto the tangent to the world line, so the overall projection can be written as:
proj(v) = v – [g(x'(q), v) / g(x'(q), x'(q))] x'(q)
= v – [g((Z cosh(q), bx, 0, Z sinh(q)), v) / (bx2 – Z2)] (Z cosh(q), bx, 0, Z sinh(q))
The resulting projections are:
eX = proj(∂Xx(q)) = (bx Z cosh(q), Z2, 0, bx Z sinh(q)) / (Z2 – bx2)
eY = proj(∂Yx(q)) = (0, 0, 1, 0)
eZ = proj(∂Zx(q)) = (sinh(q), 0, 0, cosh(q))
The spatial metric, which we will call h, is a 3×3 matrix whose entries are g(ea, eb) for a, b in {X, Y, Z}:
| h | = |
|
Recall that we require the flotilla to be limited to initial conditions such that Z2 > bx2, so all the diagonal entries here are positive.
We won’t go through all the calculations, but it is possible to show that this metric describes a space with overall negative curvature, and specifically the sectional curvatures of the three coordinate planes are:
KXY = 0
KXZ = –3bx2/(Z2 – bx2)2
KYZ = 0
This means that a triangle built of scaffolding that lies in the XZ plane will have angles that add up to less than 180°. The curvature is unbounded as |Z| gets closer to |bx|, and approaches zero as |Z| goes to infinity. It’s not surprising when we encounter non-Euclidean spatial geometry in general relativity, when spacetime itself is curved, but it’s not so obvious that the geometry of a collection of objects in motion in flat spacetime can turn out to be non-Euclidean.
It’s important to note that a flotilla like this is only undergoing Born rigid motion if bx is constant; you can’t start with one value and then change it continuously to another value, without losing rigidity during the transition. And unlike the bx = 0 case, in which the entire flotilla is instantaneously at rest in a whole family of inertial frames, with non-zero bx there is never any frame in which the flotilla is at rest.
 |
| World lines of rotating flotilla (with the z dimension suppressed) |
To generate the world lines for a flotilla of ships that are all moving in circles around the z-axis, we can use an element of the Poincaré algebra that combines a rotation in the xy plane with a translation in the t direction:
| A | = |
|
If we exponentiate A q, this gives us:
| P(q) | = |
|
Applied to xi(0) = (0, xi, yi, zi), this generates the world lines:
xi(q) = (q, xi cos(ω q) – yi sin(ω q), yi cos(ω q) + xi sin(ω q), zi)
with tangents:
xi'(q) = (1, –xi ω sin(ω q) – yi ω cos(ω q), –yi ω sin(ω q) + xi ω cos(ω q), 0)
We have:
g(xi'(q), xi'(q)) = ω2 (xi2 + yi2) – 1 = ω2 ri2 – 1
where we have defined ri as √[xi2 + yi2], and the world lines will be timelike so long as we impose the restriction:
ri < 1/ω
The acceleration along these world lines will be directed straight in towards the axis of rotation, with magnitude:
ai = ω2 ri / (1 – ω2 ri2)
which is a relativistic version of the familiar formula for centrifugal acceleration.
Our construction based on the Poincaré algebra guarantees that if we draw a vector orthogonal to any world line in the flotilla, where its tip hits another world line it will be orthogonal to that one too. But, unlike the simple situation we had with the original Rindler flotilla, that does not mean that we can find orthgonal vectors between pairs of world lines just by choosing the same value for the q parameter. If we parameterise the world lines with cylindrical polar coordinates (R, θ, Z):
x(q) = (q, R cos(θ) cos(ω q) – R sin(θ) sin(ω q), R sin(θ) cos(ω q) + R cos(θ) sin(ω q), Z)
then we find that the world lines are orthogonal to a vector that points radially without any change in q:
g(x'(q), ∂Rx(q)) = 0
but a change in q is needed when we move around the axis:
g(x'(q), ∂θx(q) + [ω R2 / (1 – ω2 R2) ] x'(q)) = 0
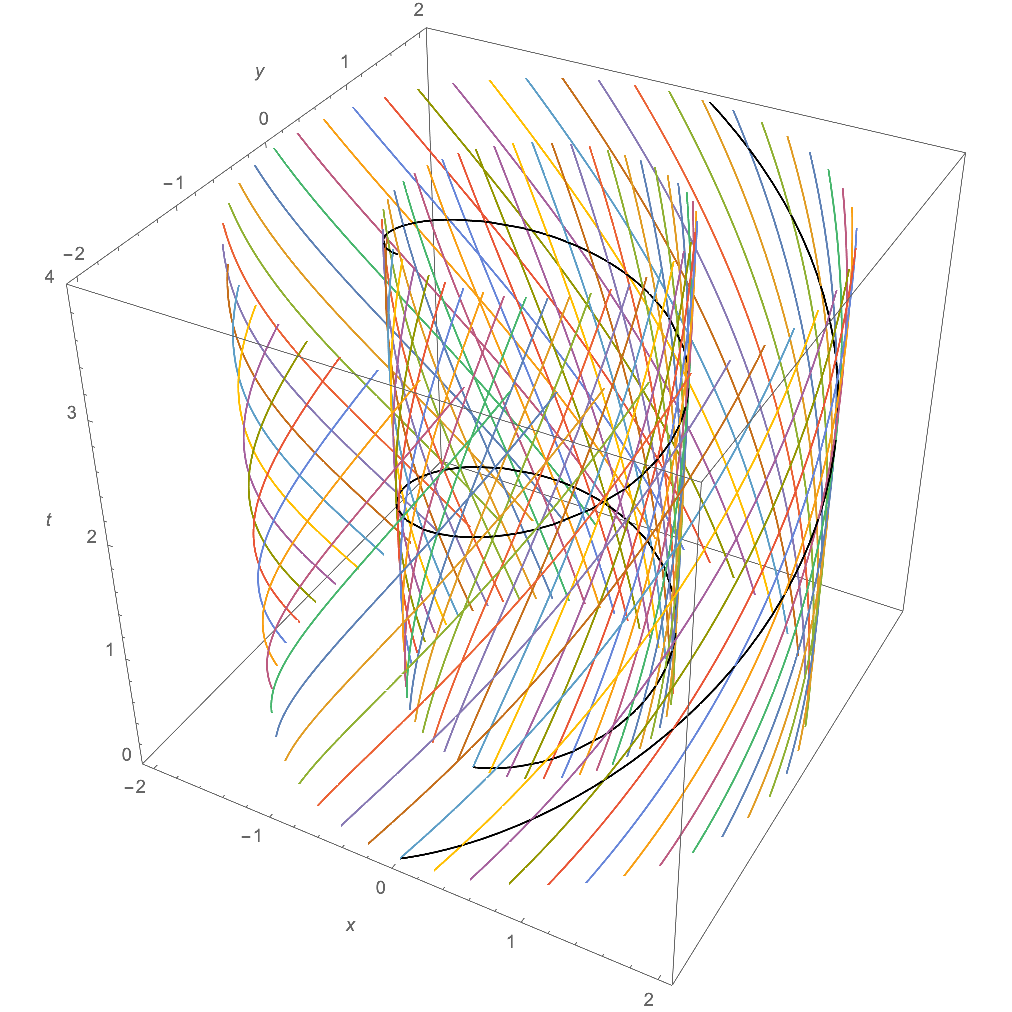 |
| World lines of rotating flotilla with orthogonal helices in black |
This means there is a family of helices, of the form:
q(θ) = [ω R2 / (1 – ω2 R2) ] θ
that are orthogonal to the world lines, and when they are followed around the axis they will, of course, not join up. So as in the case of the generalised Rindler flotilla, there is no family of hypersurfaces orthogonal to all the world lines.
This also means that there is no way to synchronise clocks between ships, even for those ships in the flotilla that share the same R value. If we imagine a ring of scaffolding that runs all the way around the axis, then all the ships on that ring will be moving at the same speed in our stationary reference frame, so there is no issue of their clocks recording different elapsed times between the same time interval in the reference frame. But it is still impossible to set all the clocks on those ships so that the events at which they all read some common value will comprise a closed, continuous curve in spacetime that is orthogonal to all their worldlines.
The geometry we have described demonstrates this conclusively: the curves through spacetime that are orthogonal to all the wordlines for spaceships on a given ring are helices, not closed curves. But it can still be hard to accept the implications of this. It’s possible to imagine all manner of very reasonable-sounding schemes that ought to allow the clocks to be synchronised. For example, suppose someone walked slowly around the ring – too slowly for relativistic effects due to their velocity relative to the ships they are walking past to come into play. If they carried a watch with them, and set each clock they encountered to agree with it, surely that would synchronise all the clocks?
Suppose the person has an angular velocity with respect to the stationary reference frame of ω+Ω, so they are advancing around the ring at an angular rate of Ω, as measured by clocks in the reference frame. The elapsed time they measure until they are back at the ship they started on will be:
τWalk(R, ω, Ω) = (2 π / Ω) √[1 – (ω+Ω)2 R2]
while the elapsed time for someone who remained on that one ship all along will be:
τFixed(R, ω, Ω) = (2 π / Ω) √[1 – ω2 R2]
Although the ratio of these two expressions will tend to 1 as Ω → 0, the difference between them does not go to zero. If we compute a Taylor series to first order in Ω
τFixed(R, ω, Ω) – τWalk(R, ω, Ω)
= (2 π / Ω) (√[1 – ω2 R2] – √[1 – (ω+Ω)2 R2])
≈ (2 π / Ω) (ω Ω R2 / √[1 – ω2 R2])
= 2 π ω R2 / √[1 – ω2 R2]
So however slowly you walk around the ring to avoid your watch getting out of synch with the clock you left behind, by the time you come full circle, the two times will differ by at least that much.
We can compute a metric for the geometry of the scaffolding, using the same techniques as we used in the previous section. In cylindrical polar coordinates (R, θ, Z), this is:
| h | = |
|
The sectional curvature is only non-zero in the Rθ plane (i.e. the XY plane, orthogonal to the axis of rotation):
KRθ = –3 ω2 / (1 – ω2 R2)2
This negative curvature grows larger in magnitude with increasing R, but even at R = 0 it is non-zero. The perimeter of a circle centred on the Z axis tends to infinity as R approaches the critical value of 1/ω (where the ships would need to be travelling at lightspeed), but the area of the disk that a circle encloses is bounded at twice the Euclidean area:
Area(R) = 2π (1 – √[1 – ω2 R2]) / ω2
Area(1/ω) = 2π / ω2
As with the general case of the Rindler flotilla, the motion is only rigid for constant values of the relevant parameter, ω. So a flotilla can’t speed up or slow down its rotational motion without violating the rigidity condition. The whole question of spinning disks was quite fraught in the early days of special relativity, as discussed in this article on the Ehrenfest paradox, though all the supposed paradoxes have since been fully resolved.
We can combine a spatial rotation with a hyperbolic rotation (with no translation) to get another class of Born rigid motions.
| A | = |
|
If we exponentiate A q, this gives us:
| P(q) | = |
|
Applied to xi(0) = (0, xi, yi, zi), this generates the world lines:
xi(q) = (zi sinh(q), xi cos(ω q) – yi sin(ω q), yi cos(ω q) + xi sin(ω q), zi cosh(q))
with tangents:
xi'(q) = (zi cosh(q), –xi ω sin(ω q) – yi ω cos(ω q), –yi ω sin(ω q) + xi ω cos(ω q), zi sinh(q))
We have:
g(xi'(q), xi'(q)) = ω2 (xi2 + yi2) – zi2 = ω2 ri2 – zi2
where ri = √[xi2 + yi2]. The world lines will be timelike if:
ri < |zi| / ω
The acceleration can be described as the sum of two components, in the radial and z directions:
ai = –ω2 ri / (zi2 – ω2 ri2) er + zi / (zi2 – ω2 ri2) ez
In cylindrical polar coordinates (R, θ, Z), the metric for the scaffolding is:
| h | = |
|
The sectional curvatures are:
KRθ = –3 ω2 Z2 / (Z2 – ω2 R2)2
KRZ = 0
KθZ = –3 ω2 R2 / (Z2 – ω2 R2)2
 |
| World lines of flotilla generated by null rotation plus translation (with the y dimension suppressed) |
A null rotation is a Lorentz transformation that leaves a null vector (a vector with equal spacelike and timelike components, such as the tangent to the world line of a photon) unchanged. When combined with a translation, it gives us a fourth class of Born rigid motions.
| A | = |
|
Exponentiating A q gives:
| P(q) | = |
|
Applied to xi(0) = (0, xi, yi, zi), this generates the world lines:
xi(q) = (xi q –zi q2/2 + bt q + bt q3/6, xi – zi q + bt q2/2, yi + by q, xi q + zi (1 – q2/2) + bt q3/6)
with tangents:
xi'(q) = (xi –zi q + bt + bt q2/2, – zi + bt q, by, xi – zi q + bt q2/2 )
We have:
g(xi'(q), xi'(q)) = zi2 – 2 xi bt – bt2 + by2
The world lines will be timelike if that quantity is strictly negative. The acceleration vector is:
ai(q) = (bt q – zi, bt, 0, bt q – zi) / [2 xi bt + bt2 – zi2 – by2]
with constant magnitude:
ai = bt / (2 xi bt + bt2 – zi2 – by2)
If we define:
m(X, Z) = 2 X bt + bt2 – Z2 – by2
then we can write the spatial metric in (X, Y, Z) coordinates as:
| h | = |
|
The sectional curvatures are:
KXY = –3by2bt / [m2 (2X + bt)]
KXZ = –3 (X bt + bt2 – by2)2 / [m2 ((X + bt)2 – by2)]
KYZ = –3by2 Z2 / [m2 ((X + bt)2 – Z2)]
The formulas for the sectional curvature are a bit complicated, but it is worth noting that, unlike the other examples, all three curvatures are generally non-zero. And there are even points where the three curvatures are identical, so the space is locally isotropic. If we set:
X = (2by2 – bt2) / bt
Z = by
where 2by2 – bt2 > 0
then for all values of Y, the tangent is timelike, and we have:
KXY = KXZ = KYZ = –3by2bt2 / [(2by2 – bt2)2 (4by2 – bt2)]
So there is a line running through the flotilla where the local geometry is the same as the geometry of a hyperbolic space.